MAE263C: Design and Control of a Dynamic Robot Leg
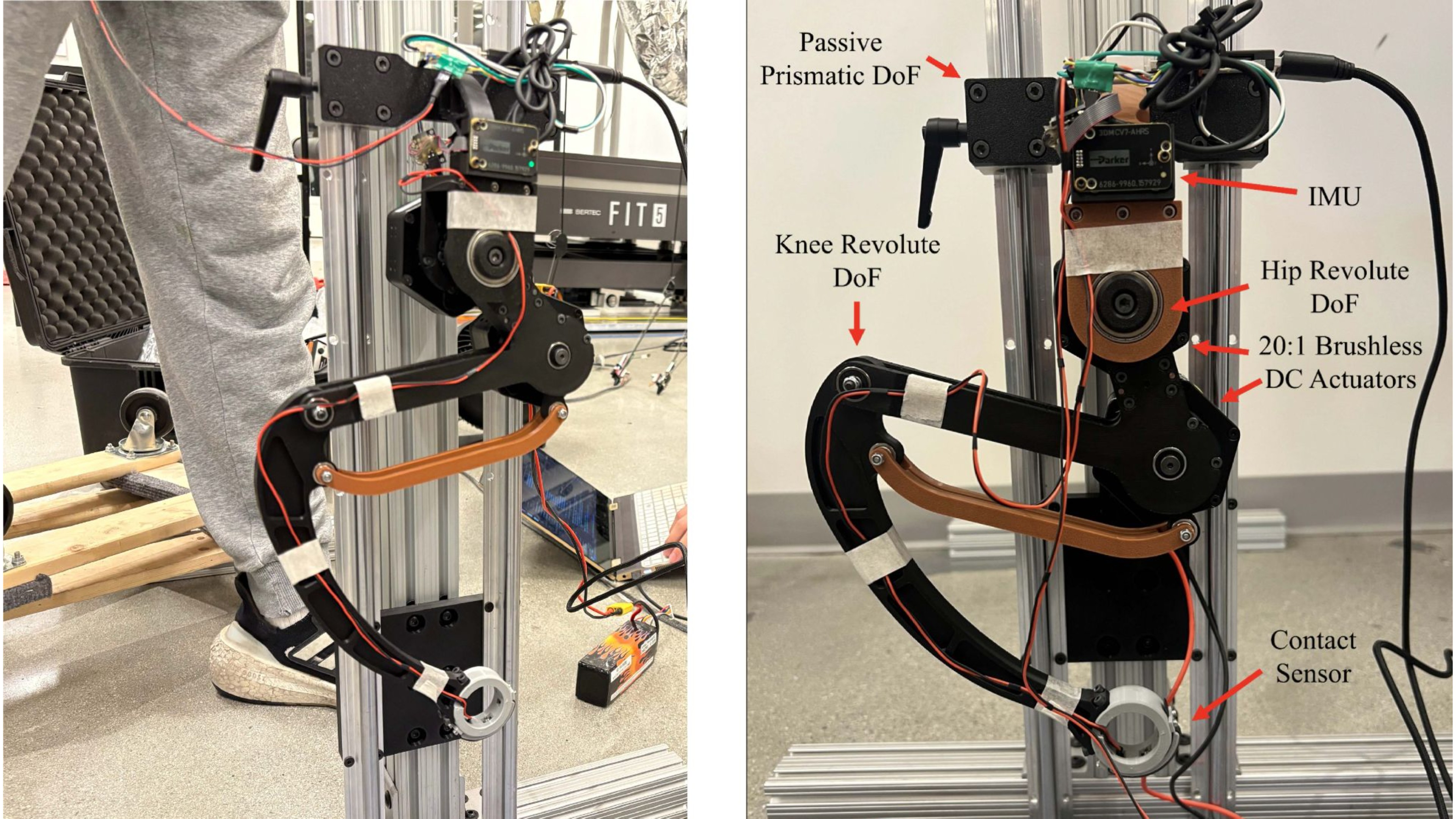
This is the final group project for UCLA’s MAE 263C: Control of Robotic Systems course, where we designed and programmed ahigh-performance, 2-DOF robot leg from scratch.
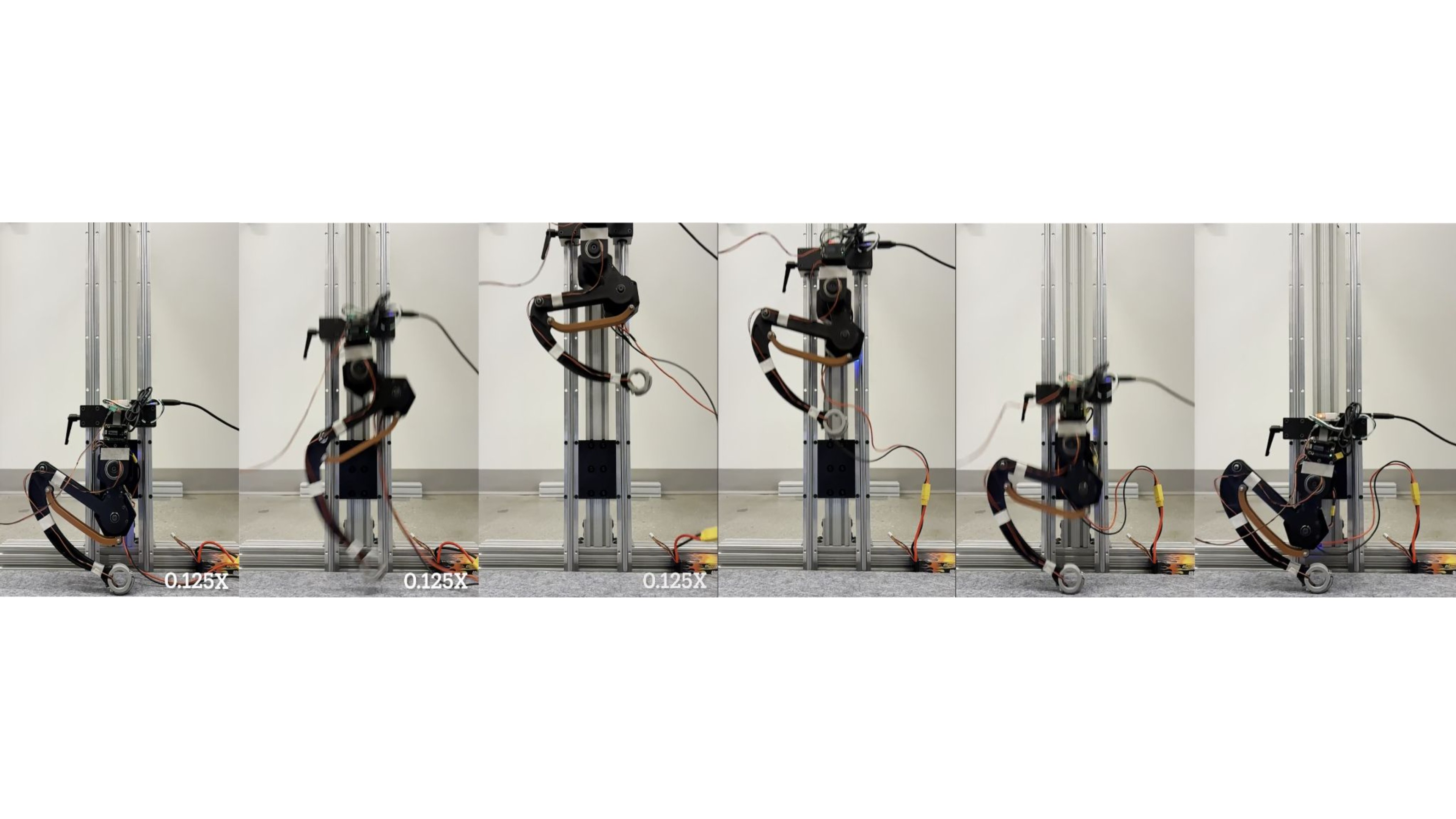
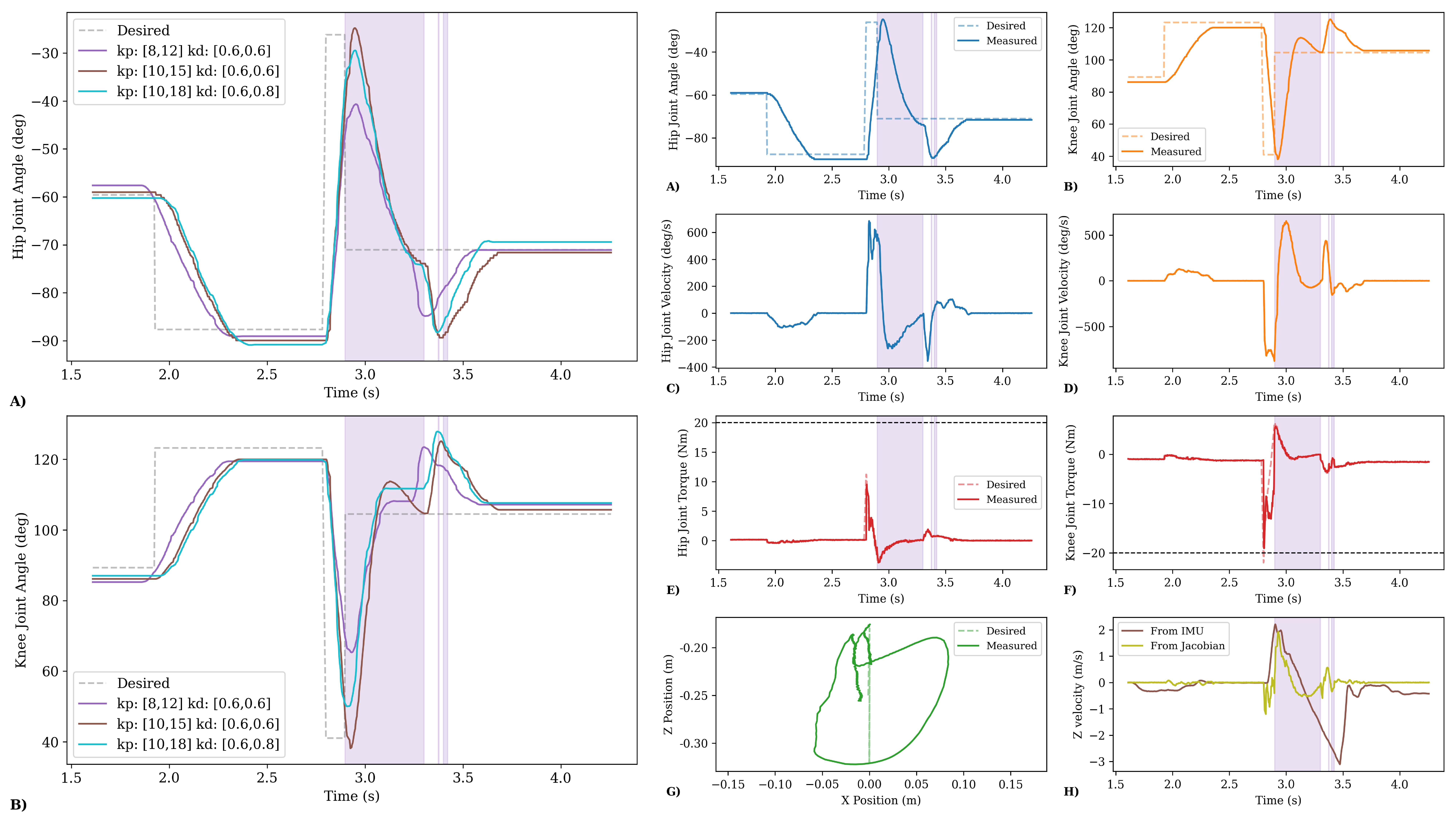
The goal of the project was to apply various controllers learned from the course to achieve powerful jumps and smooth landings. My controller achieved a jumping height (crouch to apogee) of 42.7 cm.
My Contributions to the Group Project:
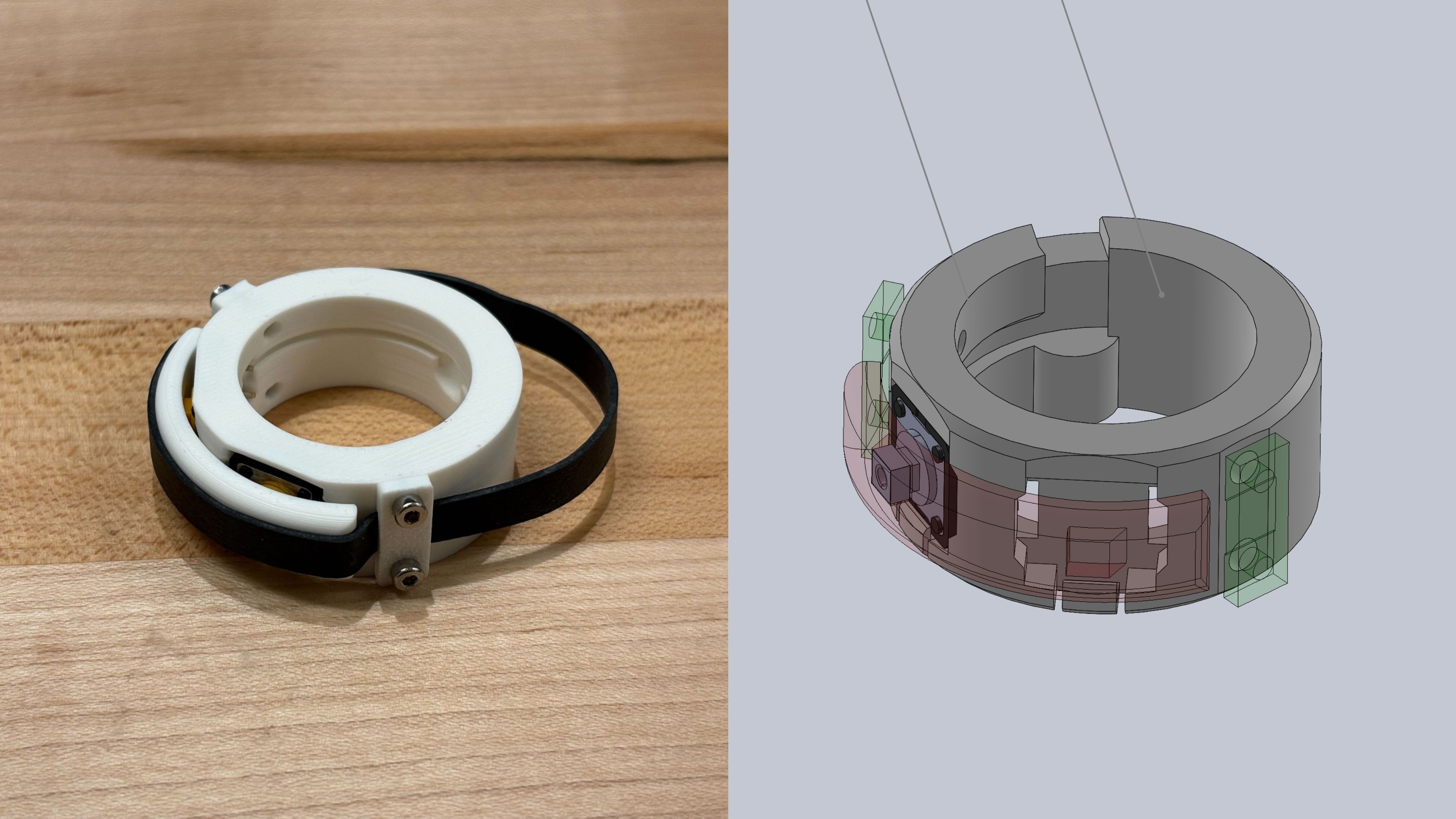
- Designed a robust binary foot sensor that was reliable enough to eliminate the need for software debouncing.
- Implemented centralized control for the leg and used the foot sensor to switch between ground and aerial phase models.
- Standardized data logging and visualization via a python script to compare various controllers designed by the team.
Skills:
- Mechatronics design (CAD)
- Controllers design and gain tuning-
- Python programming (SDKs, finite state machine).
Controller in action: Gravity/friction compensation and jumping recovery