
Robots with legs - hexapods, mainly.

A miniature, dynamic quadruped robot. Wireless (BLE) and "wireless" (Built with ZERO wires and cables).

I designed a 12-DOF robot dog similar to the MIT Mini Cheetah, but decided not to build it due to budget constraints.

A custom walking robot built to fit in the holiday atmosphere.

It's like the H1, except that it runs on a custom-made servo driver board and has built-in extension platform on top.

A six-legged robot that is as big as your palm, but works just as well as its predecessor H1.

Completely redesigned body and improved wire management.

All of my previous prototype. Couldn't have come this far without them!
Robots that drive.

A palm-size vacuum robot equipped with encoder motors, wireless communication, and edge detection.
(Paused for the moment:/)

A fully-autonomous robot that navigates inside a maze and put out fires (represented by a candle)

A real-life representation of the classic Pac-Man video game.
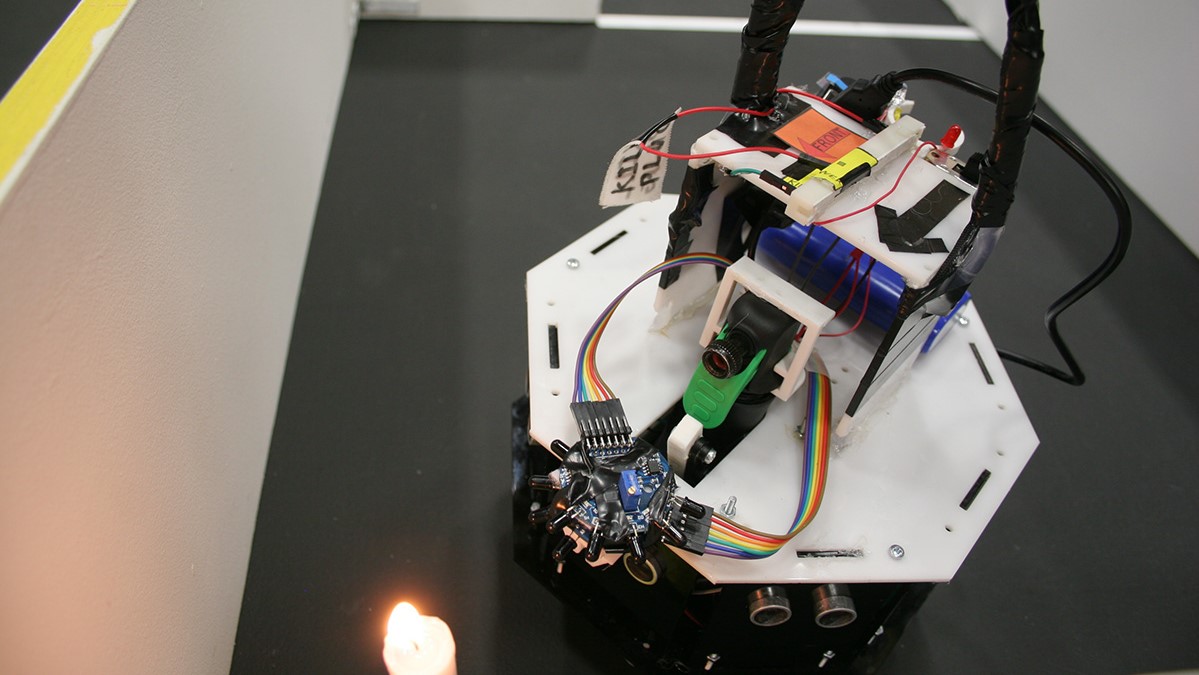
A fully-autonomous robot that navigates inside a maze and put out fires (represented by a candle) - earlier version.
Robots that neither walk or drive - but that doesn't make them less interesting!

